Positioning card design: The positioning module is based on the STM32 microcontroller as the main control core. Specifically, the ST STM32WCBU6x chip is used, which features a 32-bit ARM Cortex-M3 core. This chip integrates a 2.4GHz IEEE 802.15.4 compatible transceiver along with 128KB of Flash memory and 8KB of RAM. It is a high-performance wireless system-on-a-chip (SoC). The main control schematic is illustrated in Figure 1.
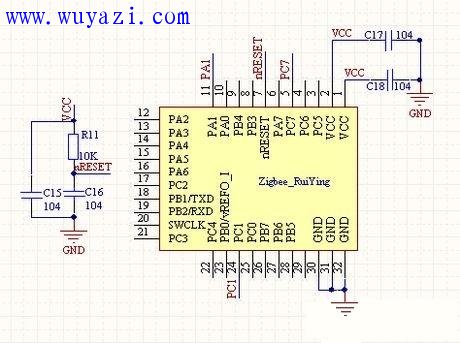
Figure 1: Schematic diagram of the main controller circuit. In this system, an external MCU is required to manage the data transmission and reception of the module. Therefore, the external MCU communicates with the module via a USART interface. The module provides a compliant USART interface that operates within an IO voltage range of 2.4V to 3.6V, with a nominal logic level of 3.3V. The module's serial port is connected to the RX terminal of the external MCU without using hardware flow control. Instead, the module's RX terminal is connected to the TX terminal of the external MCU.
Summary: The Zigbee module used in the hardware design of this positioning system employs STM32 as the main controller, significantly enhancing the overall system efficiency and contributing to more accurate personnel positioning. The Zigbee device in this solution can be powered by a standard battery, offering a minimum operational life of six months, which helps reduce costs. To address the relationship between communication distance and signal strength, the maximum likelihood estimation method is applied to minimize errors and improve accuracy.
Cast Iron LV 3PH Asynchronous Motor
Cast Iron Lv 3Ph Asynchronous Motor,Three Phase Asynchronous Cast Iron Motors,Cast Iron Motors,Cast Iron Electric Motor
Yizheng Beide Material Co., Ltd. , https://www.beidevendor.com