Research on PID Control Strategy of Automobile Auto Cruise System
Abstract: This paper introduces the structure and working principle of the auto cruise control system, and selects the PID control strategy based on Atmega 8 microcontroller to realize the stable driving and acceleration and deceleration control process of the vehicle. The system can effectively reduce the working intensity of drivers in long-distance driving, improve comfort, and reduce fuel consumption, which is conducive to environmental protection.
Keywords: automatic cruise; PID; Atmega 8
0 Introduction According to the survey, 10% of traffic accidents are caused by fatigue driving and improper operation. The automatic cruise control system described in this paper can effectively reduce driver fatigue, avoid traffic accidents, and benefit the environment. When driving on the expressway for a long time, after opening the automatic control switch of the system, the cruise control system will automatically increase or decrease the throttle opening according to the driving resistance, so as to prevent the driver from frequently stepping on the accelerator pedal to keep the driving speed of the vehicle constant. The fatigue strength of the driver is greatly reduced. Since the cruise control system can automatically maintain the vehicle speed, unnecessary artificial changes of the accelerator pedal are avoided, thereby reducing fuel consumption of the automobile and exhaust gas emissions.
1 The composition of the car cruise control system The car electronic automatic cruise control system is mainly composed of a cruise control switch, a vehicle speed sensor, an electronic control unit (ECU), an automobile brake switch, an actuator and the like. The components of the electronic automatic cruise control system and the installation of each part in the car are shown in Figure 1.
This article refers to the address: http://
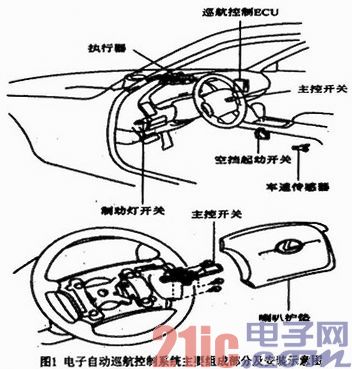
The structural principles and functions of each part will be specifically described below.
(1) Cruise control switch. When the main switch is turned on, if the vehicle speed is within the range of cruise control (generally 40~200km/h), the “set/slide†switch will be turned off. At this time, the speed will be stored in the RAM, and the car will maintain this speed. Travel. When the driver wants to increase the speed of the cruise, the "recovery/acceleration" switch is turned on, and the cruise control ECU increases the opening of the throttle through the actuator to accelerate the vehicle. At this time, the RAM that stores the actual vehicle speed parameter is stored. The memory is in a dynamic refresh state, and the vehicle speed at the moment when the switch is turned off is stored in the memory, after which the car will drive at a constant speed; when the driver desires a stable vehicle speed to decrease, the "set/slide" switch is turned on, and the cruise control ECU The throttle opening is turned off by the actuator, and the car decelerates and slides. At this time, the RAM memory storing the actual vehicle speed parameter is in a dynamic refresh state, and the vehicle speed at the moment when the switch is turned off is stored in the memory, and then the car will travel at a constant speed.
(2) Cruise control ECU. It is used to receive the signal sent by each sensor, and after calculation and processing, it sends an instruction to the actuator to control the action of the actuator.
(3) Neutral start switch. Used to control whether the car immediately exits the cruise control state.
(4) Brake switch. Installed on the brake pedal for transmitting a brake signal to the cruise control ECU (ie, the driver's step on the brake pedal) to quickly exit the cruise control state.
(5) Vehicle speed sensor. The vehicle speed sensor collects the actual real-time vehicle speed signal as an input to the electronic control unit.
2 Working principle of cruise control system Figure 2 is a schematic block diagram of a typical double closed-loop automotive electronic cruise control system. As can be seen from Fig. 2, the input of the controller is the difference between the set fixed vehicle speed signal and the actual vehicle speed feedback signal. The ECU compares the two signals to obtain an error signal, which is amplified and processed to become a throttle control signal, sent to the throttle actuator, drives the throttle actuator to operate, and adjusts the engine throttle opening to correct the actual vehicle speed. Thus, the actual vehicle speed is quickly adjusted to the driver setting. The relationship between the vehicle speed and the throttle opening when the vehicle is traveling on a flat road is usually stored in the ROM of the cruise control system ECU. The cruise control system automatically maintains the car at a constant speed based on the target speed.

When the car is at a constant cruise speed, when the speed of the car decreases, the ECU increases the throttle opening to increase the engine power, increase the torque, and the vehicle speed reaches the set speed. Conversely, reduce the opening of the throttle. When the system performs cruise control, if the vehicle speed is v on a flat road surface, press the setting switch to enter the automatic driving state of the cruise control. When the climb is encountered, the driving resistance increases. If the adjustment control is not performed, the vehicle speed will decrease. At this time, the cruise controller will increase the throttle opening according to certain control rules, so that the vehicle speed is stabilized at v, and the power balance is regained. When encountering a downhill slope, the running resistance is reduced, and the cruise control system adjusts the opening of the throttle to become smaller, so that the vehicle speed is maintained at a balance. Therefore, even if the running resistance changes, the vehicle speed changes only in a small range, achieving the purpose of stable driving. When the vehicle speed exceeds the specified upper and lower limits, the cruise system does not work. The range of the upper and lower limits is not fixed slightly depending on the model.
When the sensor of the system fails or the control signal circuit is cut off, the sensor output is zero. At this time, the vehicle speed exceeds the specified upper and lower limits, and the cruise control system stops working.
3 Selection of control algorithms for car cruise system
As the earliest developed control strategy, PID control has the advantages of simple structure, good robustness, high reliability, easy parameter setting and so on. Therefore, the PID algorithm has the widest application in industrial control. This design selects the PID control strategy to achieve the fixed speed function of the cruise system.
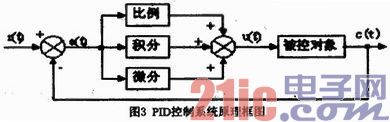
The following describes the role of each calibration step of the PID controller.
(1) Proportional link. According to the deviation signal e(t) of the control system, the control action is generated according to a certain ratio to reduce the error.
(2) Points link. Mainly used to eliminate static differences and improve the system's no difference. The strength of the integral action depends on the integral time constant. The larger the integral time constant, the weaker the integral action, and vice versa.
(3) Differential link. It can reflect the change trend (rate of change) of the deviation signal, and can introduce an effective early correction signal into the system before the deviation signal value becomes too large, thereby speeding up the system's motion speed and reducing the adjustment time.
In the digital computer control system, using the digital PID controller, the digital PID control algorithm is further divided into a positional PID control algorithm and an incremental PID control algorithm. Compared with the two control algorithms, when the computer only outputs the increment, the incremental PID control algorithm causes the output change to be small due to the computer malfunction, and the switching impact of the control state is also small. The calculation does not perform the accumulation operation, and the increment is only the nearest one. Several sampling related, the control effect is significantly better than the positional PID control algorithm. Therefore, an incremental digital PID control algorithm is selected.
4 Hardware Design Overview The auto cruise system input volume described in this article: actual vehicle speed, throttle opening, engine speed, brake switch (the system setting is the set speed when the brake switch is active). The Atmega 8 microcontroller is selected as the control core, and the actuator uses a DC motor. The control process is as follows: the set speed and the actual vehicle speed input and comparison are deviated. The PID algorithm is used to adjust the signal after the other input is processed. The Atmega 8 MCU PWM channel drives the DC motor speed to change the air door opening degree to realize the vehicle speed. control.
For safety reasons, the brake switch is directly connected to the throttle actuator in the hardware design, so that when the brake pedal is depressed, the cruise control system and the throttle cable are disconnected while stopping the constant speed control program of the single chip microcomputer. open.
The system hardware circuit is mainly composed of a microprocessor, a power supply circuit, a clutch and a DC motor drive circuit, a protection circuit, an A/D conversion circuit, and an input signal processing circuit. The Atm ega 8 microprocessor is the heart of the system. Sensors are used for signal acquisition in many places in the car cruise control system. The required sensors mainly include a vehicle speed sensor, a throttle position sensor, a brake pedal sensor, and a clutch pedal sensor.
The speed signal collected by the vehicle speed sensor is one of the most important input information of the vehicle cruise control system. The vehicle speed sensor converts the collected vehicle speed analog signal into digital quantity and sends it to the cruise control ECU. As a feedback signal, the output signal is generated after comparing with the set value, and the actuator is driven to meet the control requirement. The requirements for the speed sensor are real-time, accuracy and reliability.
The function of the throttle position sensor is to collect the throttle position signal. In the system, the throttle position measurement uses a potentiometer type angular displacement sensor, and there is an A/D conversion circuit between the sensor and the microprocessor, and the voltage signal outputted by the sensor is first converted into a digital quantity, and then processed by the microprocessor. .
The brake pedal sensor is mounted under the brake pedal and is used to obtain a brake pedal action signal to determine whether to exit the cruise system.
A clutch pedal sensor is mounted under the clutch pedal for obtaining a clutch pedal actuation signal.
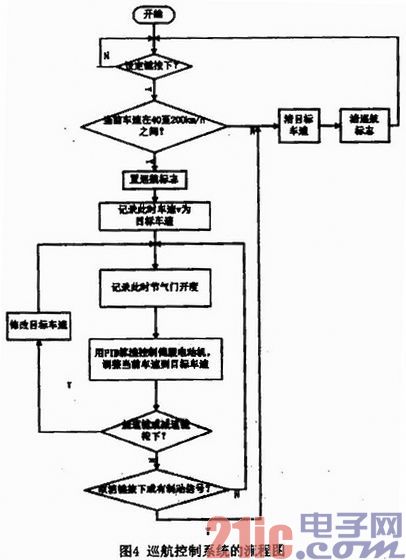
5 system software process cruise control process shown in Figure 4. In the automotive electronic cruise control system, the actual vehicle speed signal is fed back to the electronic controller and compared with the set vehicle speed. Therefore, the system works in a closed-loop control mode, and the control method adopted is an incremental PID control strategy. By programming the MCU to adjust the speed of the DC motor and the opening of the throttle, the vehicle speed remains stable within the allowable error range.
In order to clearly explain the software design of the auto cruise system, the following describes the composition of the software programming part of the single-chip computer from the modular point of view. The modules involved in the single-chip programming mainly include the initialization module, the keyboard scan module, the start judgment module, the communication module, the interrupt module, and the timing module. , watchdog module, etc.
The system detects whether there is a button press. When the cruise switch is turned on, the start determination program determines whether the vehicle speed signal obtained by the vehicle speed collecting program is within the cruiseable range. When the setting button is valid, the actual vehicle speed needs to be maintained at this speed. . The timing block realizes the timing, and the interrupt occurs when the timing time is reached. The actual vehicle speed is compared with the set value. If the difference does not operate within the error tolerance range, if not, the motor speed control block is entered to realize the vehicle speed setting. When the acceleration or deceleration button is detected, the vehicle speed setting value is first modified, and then the motor speed control block is entered to achieve acceleration or deceleration; when the brake switch is detected to be turned off, the cruise control system is exited.
6 Conclusions This paper combines the PID control algorithm with the Atmega 8 microcontroller to apply to the research of the auto cruise control system, effectively realize the stable driving of the vehicle within the error tolerance range, and can reduce the labor intensity of the driver during the long driving journey. Thereby reducing the occurrence of traffic accidents. It also makes the PID control algorithm more widely used in automotive electronics.
Ridging Machine for Agriculture:
ridging machine for Agriculture can improve the ground temperature and increase the air permeability of the soil, and our ridgers are versatile and used in farm land which is welcomed by ploughing farmers for its plurality of unique advantages. These ridging tractors are of small resistance and high efficiency. Our ridging machine also has advantages of racing against time, saving labor, working efficiency and low cost etc.

Ridging Machine for Agriculture Technical Parameters:
1. Weight: 240KG
2. Operating width: 1400 mm
3. Power: 36.8-51.8 KW
4. Size: 920*1690*1020 (mm)
Typical Applications: can be worked in paddy field, dry land, hilly ground and green house.
If you have any questions, please contact us directly. Crawler tractor for agriculture are produced by Hunan Nongfu with high quality and good appearance.
welcome you can visit our factory for inquiry, please send mail directly to us.
Ridging Machine for Agriculture
Agricultural Machinery, Ridging tractor, Ridger, ridging machine
Hunan NongFu Machinery&Electronic.Co., Ltd. , https://www.nfagmachine.com